








 您已经拒绝加入团体
您已经拒绝加入团体

 2024-11-11
2024-11-11
 4446
4446
 0
0
【摘要】 位于推进剂罐内的PMD有很多种,例如芯吸几何形状和表面,以及挡板和抑制晃动的内罐结构。
微重力环境对航天器和火箭推进剂管理装置的设计提出了独特的挑战。在太空中,粘性力和毛细管力可以主导主体力(重力/加速度),因此推进剂罐和PMD的设计必须考虑到这些微重力环境的影响。Vergalla等人[1-3]推进剂晃动和芯吸效应可导致显著的轨迹变化、车辆动力学行为变化、循环磨损、排水问题和储罐超压事件。为了减轻这种风险,必须使用位于推进剂罐内的PMD准确预测并最终控制流体的行为。这种PMD的设计依赖于对流体性质的准确了解,例如流体的表面张力和与罐壁的接触角。在微重力条件下,液体-蒸汽界面的形状以及储罐内的流体分布受到壁接触角和表面张力的强烈影响。
位于推进剂罐内的PMD有很多种,例如芯吸几何形状和表面,以及挡板和抑制晃动的内罐结构。PMD的示例如图1所示。图1所示PMD是为地球同步卫星设计的。储罐为球形,PMD安装在推进剂出口半球内。存水弯直接焊接在罐壁上。PMD在三轴稳定或绕偏离中心线的旋转轴旋转时,在重复的无限持续时间沉降插入燃烧、重复的有限持续时间横向燃烧和一生一次的换站事件中提供推进剂。叶片与航天器轴线对齐,设计用于在零重力滑行期间重新填充海绵。扇形海绵在主发动机点火瞬态和所有侧向保持机动过程中提供推进剂。横向保持机动使用有限的推进剂数量,并被长时间的滑行分隔开。海绵通过海绵下方的一个小滤网捕集器入口窗口将推进剂送入捕集器。捕集器入口窗口位于航天器的外侧,以便在旋转时获取推进剂。该捕集器旨在为一生一次的换站机动提供有限数量的推进剂。存水弯内的管状通道臂,包括穿孔板窗,将存水弯推进剂输送到出口。

图1 带有推进剂管理装置的卫星推进剂箱
将简要概述了解这些测量及其影响所需的文献背景在本节中,重点介绍接触角和表面张力。接触角是指通过液体的角度,由蒸汽和接触表面界面界定,从三个界面相交的地方测量。接触角量化了液体的润湿性,这是衡量液体粘附在表面的能力的指标。如果液体的接触角为180度,则称其为非润湿性液体,并且随着接触角的降低,润湿性的反比程度发生变化,直到在0度时,它被认为是完全润湿的;其视觉表示如图2所示。液体的这种几何特征是流体/气体/固体界面处的分子间力的结果,并且可以由于滞后而变化,例如表面污染、流体固化、流体运动、流体蒸发、温度和压力。通过分子吸引和排斥定律,从理论上详细解释了控制液体-蒸汽界面几何形状和流体行为的力;在液体中,这些是范德华力。
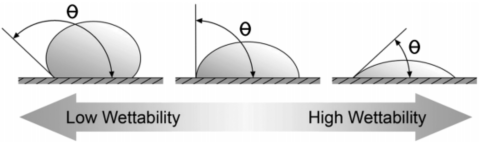
图2 润湿度
范德华力在《粘附基础》中被定义为具有共同特征的相互作用,其中“键能与分离距离的倒数六次方成比例”,这是由于三种类型的分子间键而发生的,包括:“偶极-偶极、色散和偶极诱导的偶极相互作用”。这些力控制分子在表面上的排斥和吸引相互作用,用于分子间力,以及PMD设计所关注的液体-蒸汽介质。当重力是主导力时,当界面处于平衡状态,没有对系统固有粘附行为产生不利影响的滞后时,分子间力可以通过Young-Laplace平衡力平衡进行巧妙的解析。Young-Laplace力平衡根据分子间表面力的平衡和由于流体体积内的上升而引起的液体静水压变化来确定曲率,必须知道密度和重力才能求解液滴轮廓形状,或者相反,必须知道形状才能求解分子间流体性质。这些力表示为三种表面能或表面张力,通常用从每个界面切向的矢量以图形方式表示。Kalantarian等人[4]提出Young-Laplace力平衡可用于通过使用ADSA技术求出液体的接触角。
[1] Vergalla, M., Zhou, R., Gutierrez, H., and Kirk, D., “Experimental and Numerical Framework for Characterization of Slosh Dynamics,” International Review of Aerospace Engineering, Vol. 2, No. 1, Feb. 2009, pp. 52–61.
[2] Faure, J., Vergalla, M., Zhou, R., Chintalapati, S., Gutierrez, H., and Kirk, D., “Experimental Platform for the Study of Liquid Slosh Dynamics Using Sounding Rockets,” International Review of Aerospace Engineering, Vol. 3, No. 1, Feb. 2010, pp. 59–67.
[3] Zhou, R., Vergalla, M., Chintalapati, S., Gutierrez, H., and Kirk, D. R., “Experimental and Numerical Investigation of Liquid Slosh Behavior Using Ground-Based Platforms,” Journal of Spacecraft and Rockets, Vol. 49, No. 6, Nov.–Dec. 2012, pp. 1194–1204.
[4] Kalantarian, A., “Development of Axisymmetric Drop Shape Analysis—No Apex (ADSA-NA),” Ph.D. Dissertation, Graduate Dept. of Mechanical and Industrial Engineering, Univ. of Toronto, Toronto, ON, 2011.
科学指南针充分发挥互联网技术和业务优势,在国内率先打造出业界领先的线上化、数字化的科研服务基础设施,在行业内首创用户自主下单、服务全流程追踪、测试“云现场”等模式,进一步提高了大型科学仪器设施开放共享和使用效率,以实际行动助力科技创新。现已发展成为中国专业科研服务引领者,已获得检验检测机构资质认定证书(CMA)、实验动物使用许可证、“ISO三体系认证”等专业认证。
免责声明:部分文章整合自网络,因内容庞杂无法联系到全部作者,如有侵权,请联系删除,我们会在第一时间予以答复,万分感谢。








